In this section, we are interested in the problem of minimizing an objective function f:R→R (i.e., a one-dimensionla problem). The approach is to use an iterative search algorithm, also called a line-search method.
In an iterative algorithm, we start with an initial candidate solution x(0) and generate a sequence of iteratesx(1),x(2),⋯. For eah iteration k=0,1,2,⋯, the next point x(k+1) depends on x(k) and the objective function f.
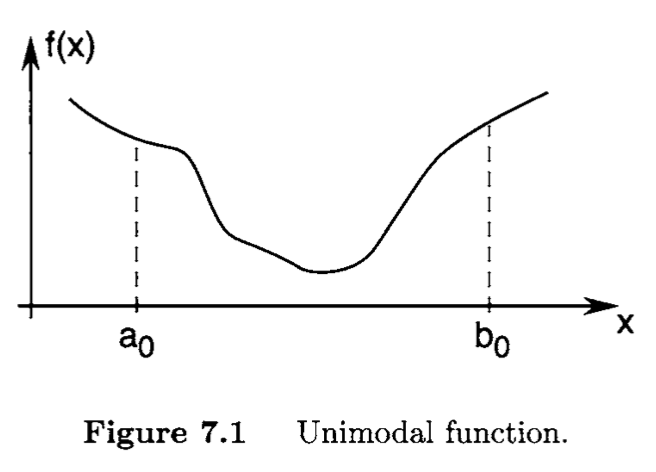
The only property that we assume of the objective function f is that it is unimodal, which means that f has only one local minimizer.
Our goal is to narrow the range prograssively until the minimizer is "boxed in" with sufficient accuracy.
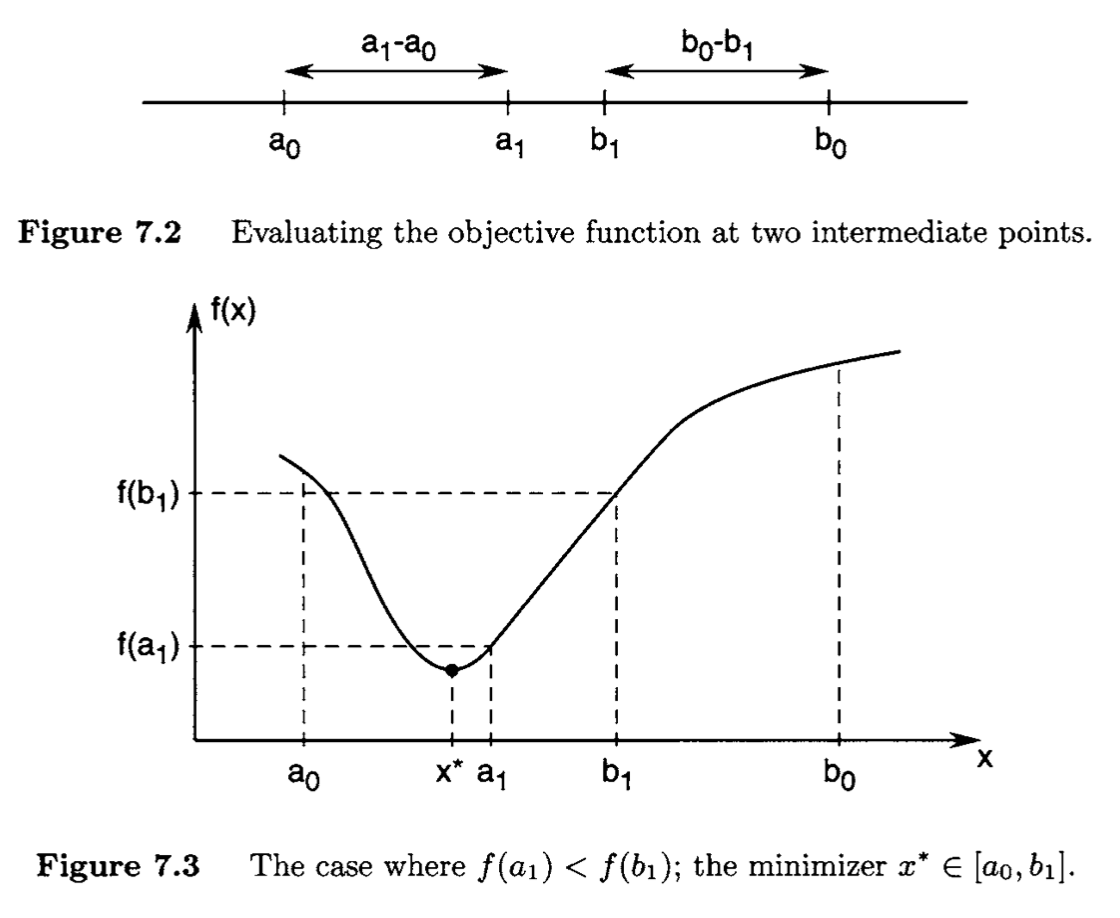
Consider a unimodel function f of one variable and the interval [a0,b0]. Illustrated in Figure 7.2, we choose the intermediate points in such a way that the reduction in the range is symmetric, in the sense that
a1−a0=b0−b1=ρ(b0,a0),ρ<21.
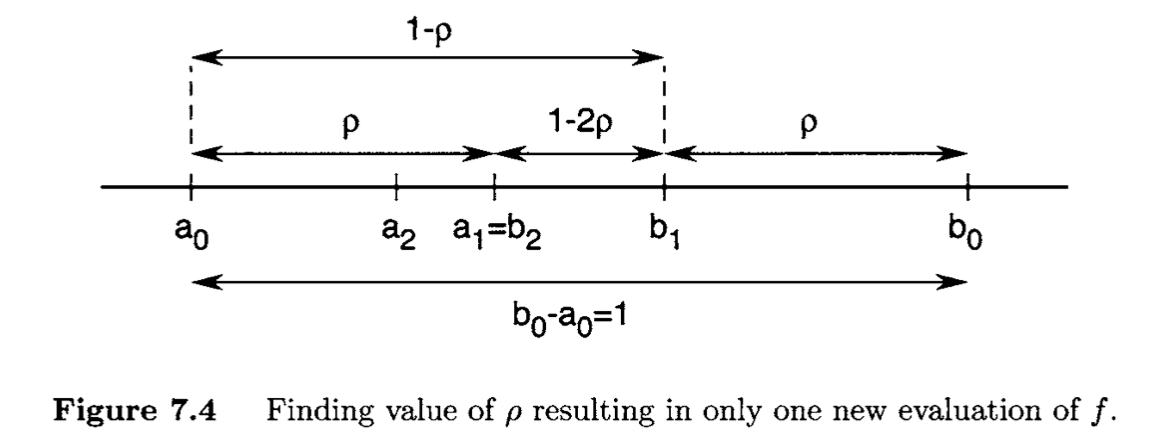
We then evaluate f at the intermediate points. If f(a1)<f(b1), then the minimizer must lie in the range [a0,b1]. If, on the other hand, f(a1)≥f(b1), then the minimizer is located in the range [a1,b0].
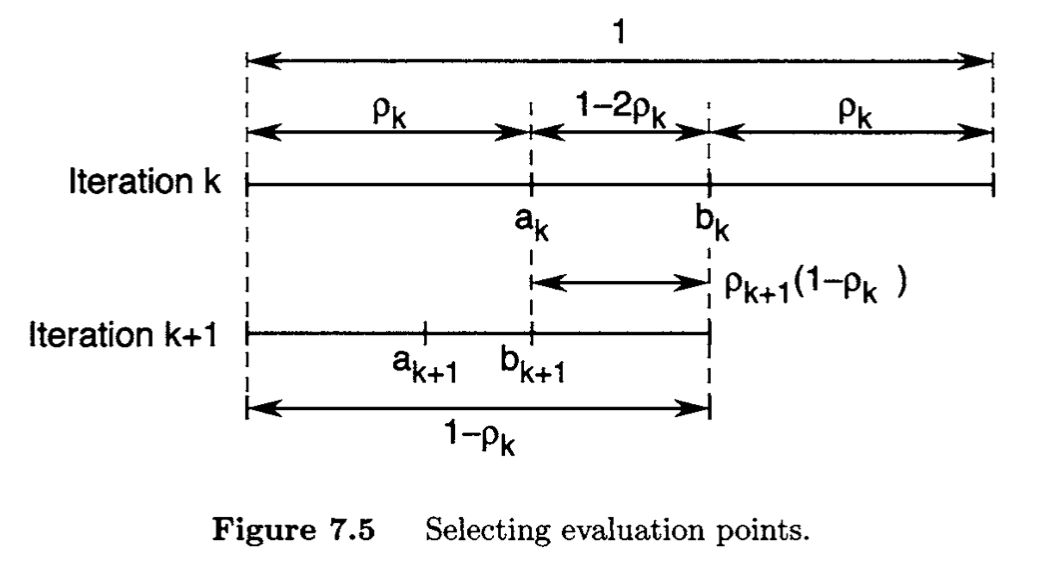
Suppose, for example, that f(a1)<f(bq). Then, we know that x∗∈[a0,b1]. Because a1 is already in the uncertainty interval and f(a1) is already known, we can make a1 coincide with b2. Thus, only one new evaluation of f at a2 would be necessary. To find the value of p that results in only one new evaluation of f, see Figure 7.4. Without loss of generality, imagine that the original range [a0,b0] is of unit length. Then, to have only one new evaluation of f it is enough to choose ρ so that
ρ(b1−a0)=b1−b2.
Because b1−a0=1−ρ and b1−b2=1−2ρ, we have
ρ(1−ρ)=1−2ρ.
We write the quadratic equation above as
ρ2−3ρ+1=0.
The solutions are
ρ1=23+5,ρ2=23−5.
Because we require that ρ<21, we take
ρ=23−5≈0.382.
Observe that
1−ρρ=5−13−5=25−1=11−ρ,
that is,
1−ρρ=11−ρ.
Using this method, the uncertainty range is reduced by the ratio 1−ρ≈0.61803 at every stage. Hence, N steps of reduction using the golden section method reduces the range by the factor
Instead of using the same ρ, we are allowed to vary the valye ρ from stage to stage, so that at the kth stage in the reduction process we use a value ρk, at the next stage we use a value ρk+1, and so on.
To derive the strategy for selecting evaluation points, consider Figure 7.5. We see that it is sufficient to choose the ρk such that
ρk+1(1−ρk)=1−2ρk.
After some manipulations, we obtain
ρk+1=1−1−ρkρk.
Suppose that we are given a sequence ρ1,ρ2,⋯ satisfying the conditions above and we use this sequence in our search algorithm. Then, after N iterations of the algorithm, the uncertainty range is reduced by a factor of
where the Fk are the elements of the Fibonacci sequence. The resulting algorithm is called the Fibonacci search method.
The uncertainty range is reduced by the factor
The Fibonnaci method is better than the golden section method in that it gives a smaller final uncertainty range.
We point out that there is an anomaly in the final iteration of the Fibonacci search method, because
ρN=1−F2F1=21.
To get arounf this problem, we perform the new evaluation for the last iteration using ρN=1/2−ε, where ε is a small number. Therefore,
1−ρN=211−(ρN−ε)=21+ε=21+2ε,
Therefore, in the worst case, the reduction factor in the uncertainty range for the Fibonacci method is
But r1=1/(1+r2)≤2/3, and hence 1−r1>0. Therefore, the result holds for k=2. Suppose now that the lemma holds for k≥2. We show that it also holds for k+1. We have
if and only if rk=FN−k+1/FN−k+2,k=1,⋯,N. In other words, the values of r1,⋯,rN used in the Fibonacci search method form a unique solution to the optimization problem.
The bisection method is a simple algorithm for successively reducing the uncertainty interval based on evaluations of the derivative. To begin, let x(0)=(a0+b0)/2 be the midpoint of the initial uncertainty interval. Next, evaluate f′(x(0)). If f′(x(0))>0, then we deduce that the minimizer lies to the left of x(0). On the other hand, if f′(x(0))<0, then we deduce that the minimizer lies to the right of x(0). Finally, if f′(x(0))=0, then we declare x(0) to be the minimizer and terminate our search.
The uncertainty interval is reduced by a factor of (1/2)N.
We assume now that at each measurement point x(k) we can determine f(x(k)),f′(x(k)),f′′(x(k)). We can fit a quadratic function through x(k) that matches its first and second derivatives with that of the function f. This quadratic has the form